



2025-03-18
自動化規劃
安澤智能自動化解決方案實例-SSD移載專案
安澤智能自動化解決方案實例-SSD移載專案
>

當機械手臂應用於自動化生產線時,其精準度與穩定性對於提高生產效率至關重要。在SSD生產與組裝的過程中,機械手臂的主要任務之一就是將SSD從存放區移載至輸送台,以便進行後續測試、包裝或組裝。
機械手臂的結構與工作原理
機械手臂通常由多個關節與驅動模組組成,以實現靈活的運動能力。而在SSD移載作業中,六軸機械手臂較為常見,因其具備較高的靈活性與精準度。
在SSD的取放作業中,機械手臂一般由以下幾個核心部分組成:
-
- 末端夾爪(End Effector):負責夾取SSD,通常使用真空吸盤或機械夾爪,以確保SSD在搬運過程中不受損害。
- 伺服馬達與驅動系統:提供機械手臂的動力,確保運動平穩且可控。
- 視覺與感測系統:透過攝影機、光電感測器或雷射測距儀來定位SSD,確保夾取與放置的精準度。
- 控制系統:由PLC(可程式控制器)或工業電腦進行運算,根據預設的程式執行取放動作。
SSD取放至輸送台的流程
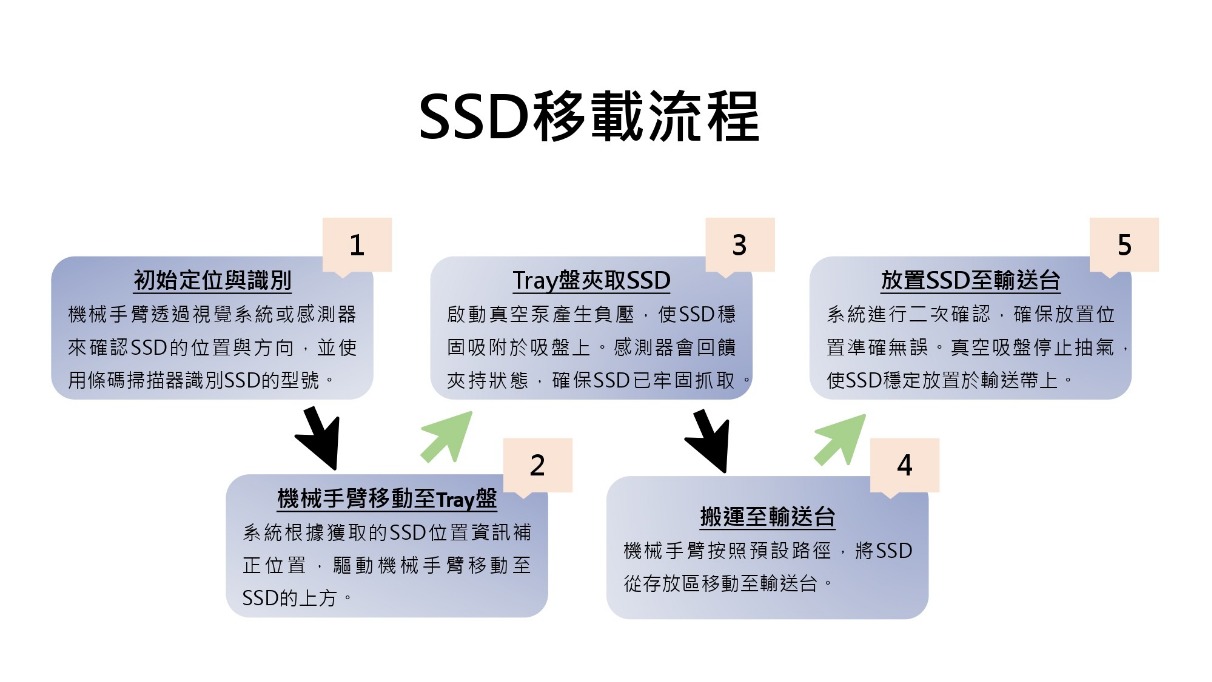
影片為實際案例,安澤智能自動化專業團隊協助某半導體製造廠,規劃並執行機械手臂於SSD生產線的移載作業,透過視覺辨識及真空吸盤確保穩定搬運。此移載專案顯著提升了生產線運作效率並降低了人工操作的誤差,提升人員價值不用做相同的動作,實現高效工廠自動化。
安澤智能自動化憑藉豐富的經驗、先進的技術以及客製化的服務能力,致力於成為企業最值得信賴的合作夥伴。如果您對工廠自動化有任何需求或疑問,歡迎與我們聯繫,我們將竭誠為您提供專業建議與解決方案!